

Drone com pernas
Engenheiros do Instituto de Tecnologia da Califórnia construíram um robô bípede que combina andar com voar para criar um novo tipo de locomoção, tornando-o excepcionalmente ágil e capaz de movimentos complexos.
Parte robô andante, parte drone voador, o robô Leonardo pode andar, pular e até andar de skate ou em uma corda bamba.
Leonardo é uma abreviação do inglês para "pernas a bordo de um drone".
"Nós nos inspiramos na natureza. Pense em como os pássaros são capazes de bater asas e pular para se equilibrar nas linhas telefônicas. Um comportamento complexo, mas intrigante, acontece quando os pássaros se movem entre andar e voar. Queríamos entender e aprender com isso.
"Há uma semelhança entre como um humano vestindo um traje a jato controla suas pernas e pés ao pousar ou decolar e como o Leo usa o controle sincronizado dos propulsores baseados em hélice e as articulações das pernas. Queríamos estudar a interface de andar e voar do ponto de vista da dinâmica e do controle," disse o professor Soon-Jo Chung.
Locomoção multimodal
Robôs bípedes são capazes de lidar com terrenos complexos do mundo real usando o mesmo tipo de movimento que os humanos, como pular, correr ou subir escadas, mas rapidamente encontram problemas em terrenos acidentados.
Já os robôs voadores navegam facilmente por terrenos difíceis simplesmente evitando o solo, mas enfrentam seu próprio conjunto de limitações: Alto consumo de energia durante o voo e capacidade limitada de carga útil.
"Robôs com capacidade de locomoção multimodal são capazes de se mover em ambientes desafiadores com mais eficiência do que os robôs tradicionais alternando adequadamente entre seus meios de movimento disponíveis. Em particular, o Leo visa preencher a lacuna entre os dois domínios díspares da locomoção aérea e bípede, que não são normalmente geminados nos sistemas robóticos existentes," disse o pesquisador Kyunam Kim.
Andar voando
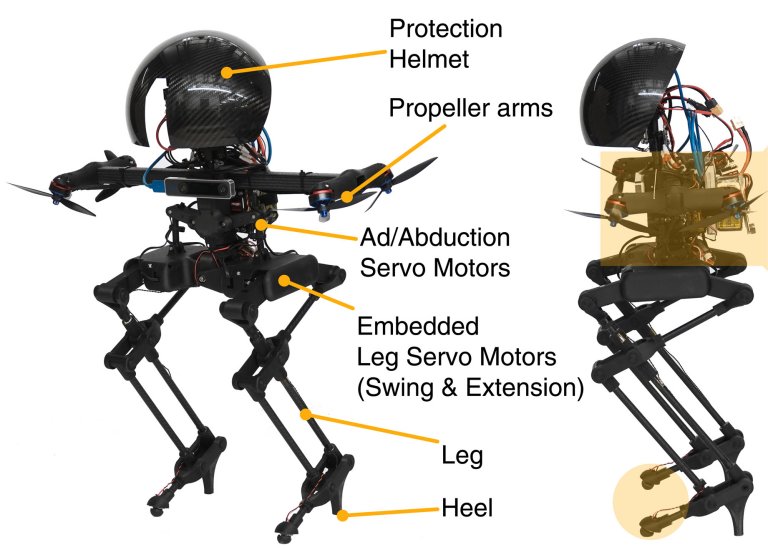
O robô tem 76 centímetros de altura e é equipado com duas pernas com três articulações motorizadas, além de quatro propulsores de hélice montados em ângulo nos ombros.
Quando uma pessoa caminha, ela ajusta a posição e a orientação de suas pernas para fazer com que seu centro de massa se mova para a frente e mantenha o equilíbrio do corpo.
Leonardo também caminha dessa maneira: As hélices garantem que o robô esteja sempre aprumado enquanto caminha, e os atuadores das pernas mudam a posição das pernas para mover o centro de massa para frente por meio do uso de um controlador sincronizado de andar e voar.
Quando é preciso sair do chão, o robô usa apenas as hélices e voa como um drone.
Bibliografia:
Artigo: A bipedal walking robot that can fly, slackline, and skateboard
Autores: Kyunam Kim, Patrick Spieler, Elena-Sorina Lupu, Alireza Ramezani, Soon-Jo Chung
Revista: Science Robotics
DOI: 10.1126/scirobotics.abf8136
Imagem: Kyunam Kim et al. - 10.1126/scirobotics.abf8136
FONTE: SITE INOVAÇÃO TECNOLÓGICA
Fale Conosco
23